Global Sensitivity Analysis
Lecture
Wednesday, February 25, 2026
Reading
- Sensitivity Analysis: The Basics from Reed et al. (2022)
- Pianosi et al. (2016)
- Saltelli et al. (2008)
Two Questions About Uncertainty
- VOI: Which uncertainty, if resolved, would most change my decision?
- GSA: Which uncertainty contributes most to the variability in my output?
These are not the same question, and the answers can disagree.
What Is Sensitivity Analysis?
SA investigates how variation in a model’s output is attributed to variation in its inputs (Pianosi et al., 2016).
\[Y = g(X_1, X_2, \ldots, X_M)\]
- Which inputs cause the largest variation in \(Y\)?
- Are there inputs whose variability has negligible effect?
- Are there interactions between inputs?
Three Purposes of SA
- Screening (factor fixing): which inputs can I safely ignore?
- Ranking (factor prioritization): which input matters most?
- Mapping: what input combinations produce extreme outputs?
Typical workflow: screen → rank → map.
Local Sensitivity: One-at-a-Time
Vary one input at a baseline \(\bar{\mathbf{x}}\), hold all others fixed:
\[ S_i^{\text{local}} \approx \frac{\partial g}{\partial x_i} \bigg|_{\mathbf{x} = \bar{\mathbf{x}}} \]
Approximate with a finite difference (\(M + 1\) evaluations):
\[ \hat{S}_i = \frac{g(\bar{x}_1, \ldots, \bar{x}_i + \Delta_i, \ldots) - g(\bar{\mathbf{x}})}{\Delta_i} \]
OAT Limitations
- Measures sensitivity at one point — may differ elsewhere
- Misses interactions between parameters
- Baseline choice is arbitrary
- Does not explore the full input range
Going Global
Global SA varies all inputs simultaneously across their full ranges.
- Captures the full range of each input
- Detects nonlinear effects
- Captures interactions between inputs
Two representative methods: Morris (OAT from many starting points) and Sobol indices (variance decomposition).
The Morris Method (Elementary Effects)
Repeat the local finite difference from \(r\) random starting points. For each input \(i\) and trajectory \(j\):
\[ EE_i^j = \frac{g(\ldots, \bar{x}_i^j + \Delta_i, \ldots) - g(\ldots, \bar{x}_i^j, \ldots)}{\Delta_i} \]
Summarize across trajectories:
- Mean of \(|EE_i|\): overall influence (ranking)
- Std. dev. of \(EE_i\): interactions or nonlinearity
Cost: \(r(M+1)\) evaluations (e.g., \(10 \times 6 = 60\) for \(M = 5\)).
Reading a Morris Plot
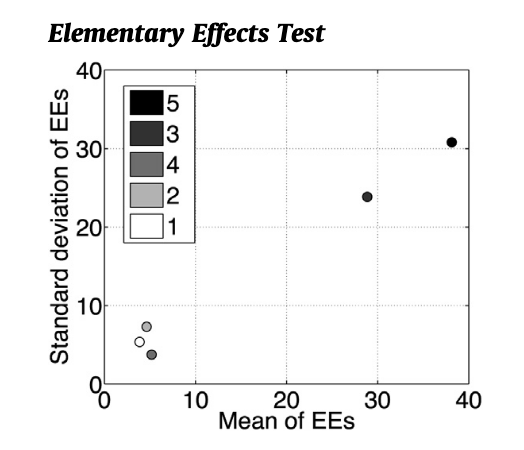
Figure 1: Source: Pianosi et al. (2016), Appendix A.
- Near origin: unimportant — screen out
- Far right, low SD: strong main effect
- Far right, high SD: important and interactive
Variance Decomposition
For independent inputs, the total variance decomposes:
\[ \text{Var}(Y) = \sum_i V_i + \sum_{i<j} V_{ij} + \cdots + V_{12\ldots M} \]
- \(V_i = \text{Var}\bigl(\mathbb{E}[Y \mid X_i]\bigr)\): main effect of \(X_i\)
- \(V_{ij}\): interaction between \(X_i\) and \(X_j\)
- Higher-order terms exist but are rarely important in practice
Sobol Indices
First-order — if you knew \(X_i\), what fraction of the variance in \(Y\) would go away?
\[ S_i = \frac{\text{Var}\bigl(\mathbb{E}[Y \mid X_i]\bigr)}{\text{Var}(Y)} \]
Total-order — if you knew everything except \(X_i\), what fraction of the variance would remain?
\[ S_{T_i} = 1 - \frac{\text{Var}\bigl(\mathbb{E}[Y \mid X_{\sim i}]\bigr)}{\text{Var}(Y)} \]
where \(X_{\sim i}\) denotes all inputs except \(X_i\).
Interpreting Sobol Indices
| Pattern | Interpretation |
|---|---|
| \(S_i\) large, \(S_{T_i} \approx S_i\) | Strong main effect, few interactions |
| \(S_i\) small, \(S_{T_i}\) large | Matters mainly through interactions |
| \(S_i\) small, \(S_{T_i}\) small | Doesn’t matter much |
| \(\sum S_i \approx 1\) | Model is mostly additive |
Screening rule: \(S_{T_i} \approx 0\) is necessary and sufficient for unimportance (Pianosi et al., 2016).
Reading a Sensitivity Analysis
Three questions to always ask:
- What inputs were varied? Different scope → different results
- What distributions were assumed? Change the distribution, change the indices
- Are the results converged? Finite samples give estimates, not exact values
The Distribution Assumption
Every GSA calculation requires a probability distribution \(p(X_1, \ldots, X_M)\).
\(\text{Uniform}(-\pi, \pi)\) gives different Sobol indices than \(\text{Normal}(0, 0.1)\).
“The definition of the input variability space is one of the most delicate steps in the application of GSA.” — Pianosi et al. (2016)
Summary
- VOI: which uncertainty affects the decision?
- GSA: which uncertainty affects the output?
- These are not the same — answers can disagree
- Both require probability distributions over inputs
- When you can’t specify distributions → deep uncertainty (Week 8)
References
James Doss-Gollin